Robots
TOMCAT, Quadruped Robot Gait Control and Analysis
TOMCAT (2003) Design: Tony Lewis, Gait Control Programming: Peter Asaro, Karl Pauwels, Chiara Bartolozzi, Elizabeth Felton, Documentation: Peter Asaro
Video1, Video2
The aim of this project was to quantify the gait patterns of the quadruped robot in terms of its maximum speed
and to investigate how altering parameters such as hip swing and roll can affect the type of gait produced.
The information gained can be used in combination with visual information to guide robotic locomotion.
The Robot
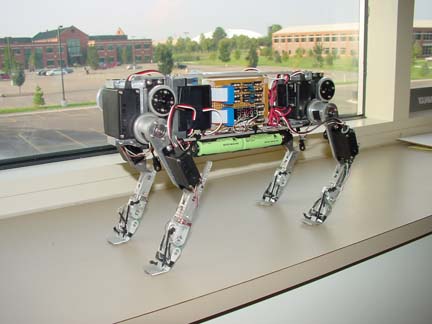
The Quadruped Robot (aka Tom Cat) from Iguana Robotics Fig. 7.2 uses limit cycle based motion control.
In order to keep a stable oscillation it switches between the swinging and supporting phases. A shorter cyclic
period contributes to a smoother, rhythmic motion. The hip and knee joints are active while the ankle is
passive.
Robot Gait
We systematically studied the behavior of the robot by altering the following parameters:
knee sweep amplitude
hip sweep amplitude
twist amplitude
lunge
phase difference between the legs
integration time dt
Each paw of the Tom Cat had a pressure sensor on it and this sensor data was collected during locomotion.
The information was used to determine when each paw was on the ground during the movement
sequence. See Table 1 below and Figs. 7.3- 7.6.
Trial dt Knee Swing Hip Swing Twist Lunge B-F Phase Gait
1 0.33 12 17.7 -7.6 0 1.32 Forward
Walk
2 0.50 10.2 0.6 -10.4 0 0 Fast Tapping
in Place
3 0.35 0 15 4.4 -8.4 0 Backwards
Sliding
4 0.11 2.4 28.5 -10 0 0 Slow Forward
Walk,
Long Stride
The footfall pattern for the forward walk (Fig. 7.3) is a sequence with the front left limb in phase with
the rear right limb and the front right in phase with the rear left. This is a typical walking pattern that is
observed in four legged animals such as cats and dogs.
The footfall pattern for the fast tapping in place (flamenco dancing) (Fig. 7.4) uses a similar sequence
to the forward walk, but the time the feet are on the ground is less and there is some ground contact time
overlap with the contra lateral limb (for example front left with front right). This is most likely due to the
higher speed and some amount of friction from the floor. The fast tapping pattern was produced by setting
the knee and hip swing amplitudes to a high value with very low twist amplitude.
The pattern for the backwards walk with sliding (moonwalk) (Fig. 7.5) shows a similar phase relationship
and overlap as the fast tapping in place. The very low amplitude for the knee swing and the large negative
lunge value contribute to the backwards sliding motion.
The slow walk gait (Fig. 7.6) is a result of the high amplitude hip swing which gives the robot’s limbs a
longer reach when moving forward.
Each of the parameters mentioned above was changed to quantify the different gait patterns and effects
upon the robot’s locomotion pattern.
The knee swing amplitude varies how much contribution the knee joint has in the gait pattern. It also
determines how high the entire leg will raise off the ground, which can impact the amount of friction during
locomotion. There is a knee swing threshold above which the robot will walk forward and below which the
robot will walk backwards.
The hip swing amplitude varies how much contribution the hip joint has in the gait pattern. Higher values
lead to a longer and potentially faster stride. With a value of zero the robot will tap in place because it does
not have any limb momentum with which to push it forward or backward.
The twist amplitude is the roll of the front of the body during walking that contributes to stabilization
and speed. If the twist is in phase with the supporting front limb during the walk, the robot will be less stable
due to more weight being on that side of the body. However, there will also be less friction during walking
because the limb will rise faster when the body rolls to the other side. If the twist is out of phase with the
supporting front limb, the robot will have increased stability since more weight will be distributed to the
swinging side of the body. There will, however, be more friction during locomotion due to less force being
placed on the supporting limb.The integration time contributes to how quickly the robot moves during locomotion. Very low and very
high values tend to lead to instability.
Robot Speed
In addition to observing the gait patterns, the time it took the robot to move eight feet during a forward trot
was recorded. A good forward walking gait was found and the robot twist and time integration parameters
were varied while keeping the knee and hip swing constant (see table below. ) The top speed obtained was
1.714 robot body lengths / second. (One body length is 10 inches.) Changing the twist amplitude from a
large negative value of -10.4 to a smaller value of -0.8 created significant increases in the speed.
Trial dt Knee Swing Hip Swing Twist Body Lengths / sec
1 0.40 16.8 19.4 -10.4 1.343
2 0.40 16.8 19.4 -5.2 1.171
3 0.40 16.8 19.4 -5.2 1.548
4 0.40 16.8 19.4 -5.0 1.627
5 0.40 16.8 19.4 -2.8 1.655
6 0.40 16.8 19.4 -2.8 1.655
7 0.40 16.8 19.4 -0.8 1.655
8 0.40 16.8 19.4 -0.8 1.714
91